![]()
オプティカニクス総合取扱製品
opticanics.com
ピエゾ(圧電素子)アクチュエータ / 駆動電源
- HOME
- ピエゾ(圧電素子)アクチュエータ / 駆動電源
- フィードバック コントローラー PosiCon 150/X Piezomechanik GmbH
フィードバック コントローラー PosiCon 150/X Piezomechanik GmbH
Piezomechanik Dr. Lutz Pickelmann GmbH
フィードバックコントローラ PosiCon 150/X
ピエゾ ドライバー
◉ピエゾアクチュエータとストレインゲージを組み合わせたクローズドループ精密位置決め用の完全なフィードバッククローズドループコントローラ
◉PIEZOMECHANIK社製ストレインゲージを使用
◉ストレインゲージアンプ、フィードバックエレクトロニクス、ピエゾ電圧アンプを含む
◉最大ストロークで出力-30V/+150

3チャンネルPosiCon 150/3
Posiconコントローラは以下のタイプがあります。
シングルチャンネル PosiCon 150/1
3チャンネル PosiCon 150/3
ピエゾポジショニングシステム "PosiCon "は,ピエゾアクチュエーターの閉ループ制御に必要な電子サブシステムをすべて備えた完全なシステムです。
⦿ 位置センサー信号増幅器ステージ
⦿ フィードバック制御ロジック
⦿ ピエゾ電圧増幅器
⦿ ピエゾ電圧範囲:-30V/+150V
ピエゾアクチュエータは、PosiConデバイスの電圧範囲に対応し、オプションの "ポジションセンサー "を表示する必要があります(アクチュエータのデータシートを参照)。
精度と応答時間の点で、幅広い位置決めアプリケーションに対応しています。また、アンプステージはセミバイポーラ方式を採用しているため、大きなストロークでもノイズが少なく、位置決めシステムのスムーズな反応を実現します。
デュアルユース
PosiConデバイスは、「クローズドループ」または「オープンループ」モードで動作させることができます。
モードの選択はフロントパネルのスイッチで簡単に行うことができます。
マルチチャンネルの場合は、各チャンネルを個別に設定することができます。オープンループ "モードでは、PosiConはシンプルなピエゾアンプとして動作します。
位置情報は "オープンループ "モードでも提供されます("表示 "および "モニター "参照)。
フィードバック制御されたPosiConシステムの利点
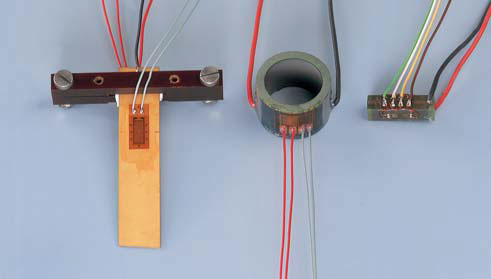
表面実装型ひずみゲージを用いた圧電部品の数々。
ピエゾアクチュエーターのストロークは,ケーシング内のピエゾスタックに直接取り付けられた位置センサー(ストレインゲージ)によって測定されます。これにより、センサはスタックのひずみ状態に影響を与える内部および外部のあらゆる影響を検出します。
その結果
⦿入力された基準信号に従ったアクチュエータの高度に直線的で再現性のある動き(ピエゾ材料のクリープ,ヒステリシス,非直線性の排除)。
⦿ピエゾスタックの歪みを変化させる可能性のある荷重変動に対して、自動的に自己補償を行う:PosiConシステムは実質的に無限の⦿剛性を示す(荷重が変化しても歪みが変化しない)。
アクチュエータの潜在的な熱膨張をも補正する特殊な熱補償ストレインゲージを使用しています。
機能要素、動作
"オープン/クローズドループ選択スイッチ "フィードバック"
PosiConの各チャンネルは、スイッチで "オープンループ "と "クローズドループ "を選択することができます。オープンループ "モードでは、PosiConは通常のピエゾアンプのように動作します。
位置検出は引き続き行われるため、位置情報は "LC-Display "と "Monitor "で提供されます。
"オフセット"
クローズドループ動作:
位置の手動設定が可能です。位置は "Offset "で直線的に変化し、ヒステリシスやクリープはありません。
負荷力の変化による位置の変動は自動的に補正されます。
オフセット」の設定は、外部信号に重畳されます。
オープンループ動作:
出力ピエゾ電圧の手動設定が可能です。
操作部の位置は "オフセット "によって変化し、ヒステリシスとクリープを伴う通常のオープンループ動作となります。
オフセット」の設定は、外部信号に重畳されます。
LC-ディスプレイ
チャンネルごとに "μm "と "Volt "を表示
ゼロ設定:
ピエゾアクチュエータの動作開始点は、取り付け力や予圧などの様々な条件に依存します。
適正な位置を読み取るために、PosiConの各チャンネルは、フロントパネルのポテンショメーターによって個別に「ゼロ」に設定することができます。
ゲインファクタ
PosiConの各チャンネルのアンプのゲインファクタは、スイッチで個別に設定することができ、フルストローク動作のために5Vまたは10Vの入力信号を交互に受け入れることができます。
"モニター"
フロントパネルとリアパネルのBNCコネクタを介して、各チャンネルの位置とピエゾ電圧のリアルタイム情報としてアナログ信号を個別に提供します。
ピエゾ電圧は1:1000の割合で低減されています。位置はフルストローク相当の5Vの揺れで表されます。
センサー入力:
PosiConユニットは、入力に4つのアクティブエレメントのホイートストンブリッジからの信号を必要とします。
このセンサーエレメントは通常、ピエゾアクチュエータに取り付けられます(オプション:位置検出)。
しかし、このセンサーは、外部のメカニズムに取り付けることもできます。
電気コネクタ、4極LEMO 0S.304
ピエゾ電圧出力:
BNC
オプションで、LEMO 00 250などの他の接続システムも利用できます。
出力電圧:
PosiCon 150: -30V ~ +150V/ 最大電流:60mA
キャリブレーション;
校正は、PosiCon の位置表示("μm"-LCD と "Monitor")をアクチュエータの性能に合わせるためにのみ必要です。
校正はPIEZOMECHANIKの工場で行われ、各アクチュエータとPosiConの組み合わせに対して有効です。
校正されていないシステムは、"閉ループ "フィードバックモードでも動作しますが(ヒステリシス、クリープなどの補正)、位置の読み出しだけは有効ではありません。
反復性・感度
精度とは、等価な入力信号を印加したときに、目的の位置に到達するための許容範囲を意味します。
A、ランダムアクセスで位置を指定する場合、PosiConシステムは約±0.1%の繰り返し公差を示します。
PosiConシステムは、約±0.1%の繰り返し公差を示すことができます。
50mmのアクチュエーターは、±50ナノメートルの許容範囲内で動作します。
+/- 50ナノメートルの公差領域(残留ヒステリシス)で動作します。
B, 周期的な動きのプロファイルでは、再現性はさらに良くなります。
C, クローズドループモードでは、位置の相対的な変化を解決できる最小値は約5nmです。
ピエゾアクチュエーターによる精密位置決め
ピエゾアクチュエーターは、小さな電圧で無限に小さな動きをすることができるという特徴があり、超精密な位置決めが可能です。
一方で、ピエゾアクチュエーターに大きな電圧信号の変化を与えると、実際の位置のステップ幅に影響を与えることがあります。
一方、ピエゾアクチュエーターに電圧信号を大きく変化させた場合、実際の位置ステップ幅は、アクチュエーターに作用する多くの内部および外部パラメーターに影響されるため、最初の瞬間には、電圧と誘導運動の関係を大まかにしか予測することができません。このことは、ピエゾアクチュエーターに一連のランダムな電圧ステップを適用したり、よく知られているヒステリシスループを生成する明確な電圧範囲でサイクルを実行することによって、簡単に実証することができます。
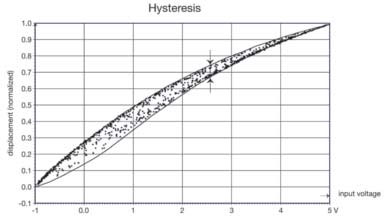
ランダムな電圧ステップのシーケンスに対するピエゾアクチュエーターの位置と駆動電圧のオープンループ相関。ランダムに生成された点の列が、ヒステリシスサイクルに囲まれた領域を埋めている。
さらに、フルスケールの電圧を連続的に変化させた場合の通常のヒステリシス・サイクルも示されている。
実際の位置に関するこの情報を得るために、アクチュエータは適切な種類の位置検出効果またはセンサーと組み合わされます。"適切」とは、精度、再現性、直線性が十分に高いことを意味します。
フィードバック制御により、アクチュエータの実際の位置は、入力信号の大きさによって定義される希望の位置と常に比較されます。希望位置(基準位置)と実位置の間に差が生じた場合、フィードバック制御はその差を即座にキャンセルし(アクチュエータ-センサの閉ループ動作)、システムは完全な位置に落ち着きます。
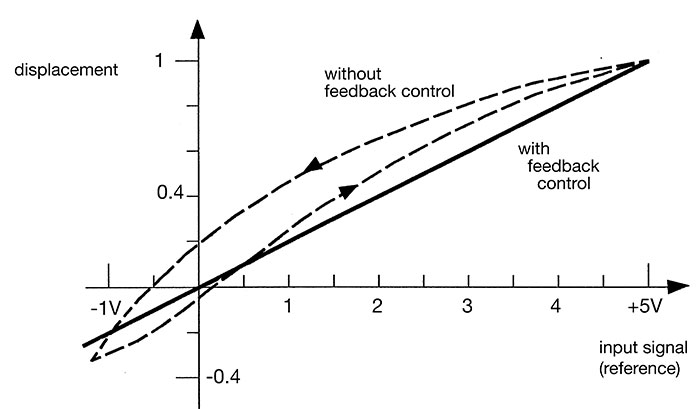
ストロークとピエゾメカニカルシステムへの基準入力電圧の関係
A オープンループ動作(標準アンプまたはPosiCon Aの "フィードバック・オフ "モードによる)。
結果:典型的なピエゾアクチュエーターの非線形ヒステリシス特性。ヒステリシスは約15%。
B PosiConシステムと位置センサ付きアクチュエータの閉ループ動作。
結果:残留ヒステリシスのある線形特性:アクチュエータの最大ストロークの0.1%の大きさのオーダーを持つ線形特性。